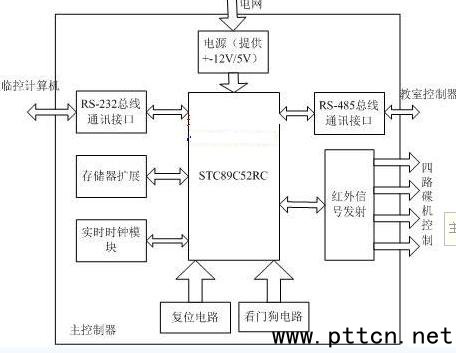
主頁(http://www.by236.com):基于單片機控制的新型智能控制系統設計 多媒體教室是現代化教學環境和設施的重要組成部分,目前我國各類學校都建設了一批多媒體教學課室,勇于開展多媒體教學,有力地推動了教學手段的現代化 正在逐步改變教師的教授和學生的學習模式,加大了教學信息量,提高了教學效率和教學質量,加快了教學改革步伐而基于單片機控制的智能教室控制系統主控制器溝通了控制計算機與教室控制器之間的聯系,起到橋梁的作用作為分布式控制的系統的核心,主控制器的性能的優劣直接影響到整個系統功能的實現因此主控制器的設計至關重要,本文將對主控制器的硬件和軟件進行設計研究 2 主控制器硬件總體設計 3 硬件電路詳細設計 對于一個電氣系統,電源是不可缺少的部分STC89C52RC單片機為+5V供電,而外圍觸發電路需要+12V的電源在這種情況下,所需電壓的得到一般可通過外部開關電源或交流220V單相電經變壓器、經過橋式整流后再經過電容、電感濾波直接得到一般來講,這樣得到的+12V和+5V電源負載能力較強但波紋較大,很難直接應用到系統中因此,一般要經過DC/DC變換將該電壓進行隔離穩壓處理
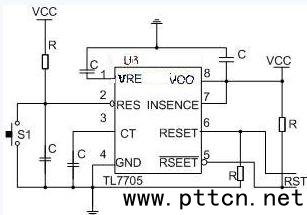
3.2 復位電路與看門狗電路設計
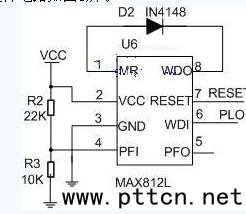
電路除了具有上電自動復位功能外,還可以通過復位按鍵迫使RESET為低電平當系統掉電時,復位電容里存儲的能量可以以二極管為通路迅速放電,這為單片機在復位上電的情況下可靠復位提供了保證 看門狗的作用就是防止程序發生死循環,或者說程序跑飛硬件看門狗是利用了一個定時器,來控制主程序的運行,也就是說在主程序的運行過程中,我們要在定時時間到之前對定時器進行復位如果出現死循環,或者說PC指針不能回來那么定時時間到后就會使單片機復位本次設計中,采用MAX813L芯片作為硬件看門狗,其RESET端與單片機復位端相連提供復位信號,由單片機的P1.0提供喂狗信號看門狗硬件電路如圖3所示
3.3 系統通訊接口設計 由于主控制器安裝在主控室內,與安裝在教室內的教室控制器之間距離較遠,且工作環境復雜,兩者的通信存在很大的環境干擾本系統的設計從經濟條件、施工難度、傳輸距離等方面考慮,選擇了工業控制系統中常用的RS-485總線使用RS-485總線,一對雙絞線就能實現多節點聯網,構成分布式系統但是如果在工程中需要更長的通信距離,超出RS-485接口能夠提供的可靠傳送數據范圍時,單一的RS-485通信控制芯片對就無法完成了這時,必須在傳輸線路中增加中繼器利用RS-485中繼器,可以將一個大型RS-485網絡分隔成若干個網段RS-485中繼器就如同RS-485網段之間連接的“橋梁”當然每個網段還是遵循上面的485規范,即 1.2公里長度,32個節點數 4 主控制器軟件設計 系統軟件設計根據功能要求軟件控制模塊可分為上電后系統開始運行,系統先調用初始化,對各個接口狀態進行自檢,對各個控制寄存器賦初值,然后進入循環等待操作命令的到來并執行命令系統處于循環狀態運行時則調用通訊子程序工作,接收控制計算機發送的控制命令,同時向教室控制器進行轉發;系統中斷時調用定時中斷服務子程序主控制器程序運行框圖如圖4所示 4.1 通訊子程序設計 |