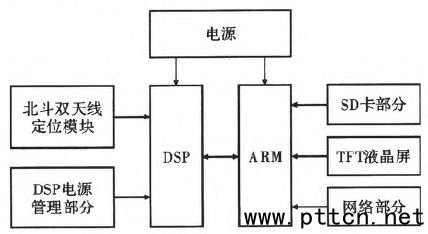
÷ųŪď£®http://www.by236.com£©£ļ“Ľ∑NĽý”ŕŽpŐžĺÄĶńĪĪ∂∑∂®őĽŌĶĹy‘O”čŇcĆć¨F(2) 2 ŌĶĹy”≤ľĢ‘O”č ŌĶĹy Ļ”√DSP+ARMŽp–ĺ∆¨ĹYėč£¨DSP÷ų“™ōďōüĹ” ’ĪĪ∂∑ń£ČKĶń∂®őĽ–ŇŌĘļÕň„∑®ŐéņŪĻ¶ń‹£¨ARM–ĺ∆¨ōďōüŇcDSP–ĺ∆¨Õ®–Ň°ĘŅō÷∆TFT“ļĺß∆ŃĶńÔ@ ĺĻ¶ń‹°£”≤ľĢ‘O”č÷ų“™įŁņ®Žä‘ī≤Ņ∑÷°ĘARM≤Ņ∑÷°ĘDSP≤Ņ∑÷°ĘĺWĹj≤Ņ∑÷°ĘTFT“ļĺß∆Ń≤Ņ∑÷“‘ľįĪĪ∂∑ń£ČK∂ŗ≤Ņ∑÷Ķń‘O”č°£ 2.1 ŌĶĹy”≤ľĢĹYėčŅÚąD
2.2 Žä‘ī≤Ņ∑÷ ŌĶĹy Ļ”√›^ěť≥£“äĶń12 VŽäČļ◊ųěťŅāĶńŽä‘ī›Ē»Ž£¨ĹõLM2596–ĺ∆¨Ķ√ĶĹ5 VŽäČļ◊ųěťDSPń£ČKļÕTFT“ļĺß∆ŃĶńŽä‘ī£¨5 VŽäČļĹõASM1117Ķ√ĶĹ3.3 VŽäČļ◊ųěťARMń£ČKļÕĺWĹj≤Ņ∑÷“‘ľįTFŅ®ĶńŽä‘ī°£ 2.3 ARM≤Ņ∑÷‘O”č ARM–ĺ∆¨ Ļ”√“‚∑®įŽĆßůwĻęňĺĶńSTM32F103VET6–ĺ∆¨£¨‘ď–ĺ∆¨ěť32őĽCortex—M3É»ļňőĘŐéņŪ∆ų£¨÷ųÓl◊ÓłŖŅ…Ŗ_72 MHz£¨∑‚—běťLQFP100£¨úp–°ŃňPCBįŚĶń√ś∑e°£ŃŪÕ‚£¨ŖÄ÷ß≥÷IOĻ‹ń_Ķń÷ō”≥…šŇš÷√£¨ĹĶĶÕŃňPCB≤ľĺÄĶńŽy∂»£¨«“÷ß≥÷JTAG°ĘSWDÉ…∑N’{‘á/Ō¬›dń£ Ĺ£¨∑ĹĪ„”√ĎŰ Ļ”√ –√ś…Ō›^ěť≥£“äĶń’{‘áĻ§ĺŖJ-LINK’{‘á/Ō¬›d≥Ő–Ú£¨“Úīň Ļ”√∑ĹĪ„°£ 2.4 DSP≤Ņ∑÷’f√ų DSP≤Ņ∑÷ Ļ”√Ķń–ĺ∆¨ěťTIĻęňĺĶń–¬–ÕĒĶ◊÷–ŇŐĖŐéņŪ∆ųTMS320F28335£¨‘ďŅÓ–ĺ∆¨◊ÓłŖ÷ųÓlŖ_150 MHz£¨≤…”√ĻĢ∑ūŃųňģĺÄĹYėč£¨≤ĘĺŖ”–∆¨É»”≤ľĢ≥ň∑®∆ų£¨ÕÍ≥…“Ľīőł°ŁcĒĶĶń≥ňľ”Ŗ\ň„÷Ľ–Ť10āÄôC∆ų÷‹∆ŕ£¨Ļ Ņ…ŖM––łŖňŔĒĶďĢŖ\ň„°£ 2.5 ĺWĹj≤Ņ∑÷’f√ų ĺWĹj≤Ņ∑÷÷ų“™ŐŠĻ©Ńň“ĽāÄŅ…ŖxĻ¶ń‹£¨ģĒólľĢĚM◊„ērŅ…ĆĘŌĶĹyĶń∂®őĽ–ŇŌĘįlňÕĶĹ“‘ŐęĺW…Ō£¨Ļ©Ŗh∂ňĶń”√ĎŰ‘LÜĖ°Ę≤ť‘É°£ ŌĶĹy Ļ”√√ņáÝőĘ–«ĻęňĺĶńENC28J60ĺWĹj–ĺ∆¨£¨‘ď–ĺ∆¨ěťIEEE802.3ľś»›Ķń“‘ŐęĺWŅō÷∆∆ų£¨÷ß≥÷»ę/įŽŽpĻ§ń£ Ĺ£¨Ļ§◊ųŽäČļľś»›TTLŽä∆ĹļÕCMOSŽä∆Ĺ£¨Ņ…ĺé≥ŐēĢ‘ŕįl…ķõ_ÕĽēr◊‘Ą”÷ōįl£¨Ņ…ĺé≥ŐŐÓ≥šļÕCRC…ķ≥…£¨”√”ŕŅžňŔįlňÕĒĶďĢĶńÉ»≤ŅFIFO°ĘDMA“‘ľį”≤ľĢ÷ß≥÷ĶńIP–£ÚěļÕ”čň„°£∆š∑‚—běťSSOP28£¨ŇcőĘŐéņŪ∆ųĶńśúĹ”∑Ĺ ĹěťSPIŅāĺÄ£¨“ÚīňŅō÷∆∑ĹĪ„£¨◊ÓłŖňŔ∂»Ņ…Ŗ_10 Mbit·s-1°£ 2.6 TFT“ļĺß∆Ń≤Ņ∑÷’f√ų TFT“ļĺß∆ŃĶń√ŅāÄŌŮŁcĺý «”…ľĮ≥…‘ŕŌŮňōŁcļů√śĶńĪ°ń§ĺßůwĻ‹ĀŪÚĆĄ”Ķń£¨Źń∂ÝŅ…◊ŲĶĹłŖňŔ∂»°ĘłŖŃŃ∂»°ĘłŖƶĪ»∂»Ô@ ĺ∆ŃńĽ–ŇŌĘ£¨ «ńŅ«į◊Óľ—ĶńLCD≤ …ęÔ@ ĺ‘Oāš÷ģ“Ľ£¨∆š–ßĻŻĹ”ĹŁCRTÔ@ ĺ∆ų£¨ «¨F‘ŕĻP”õĪĺŽäńXļÕŇ_ ĹôC…ŌĶń÷ųŃųÔ@ ĺ‘Oāš°£ ŌĶĹy Ļ”√16 bit’ś≤ …ę£¨320×240∑÷Īś¬ TFT“ļĺß∆Ń°£STM32F103ARM–ĺ∆¨ōďōüTFT“ļĺß∆ŃĶńÚĆĄ”£¨STM32F103ARM–ĺ∆¨ŇcTFT“ļĺß∆Ń÷ģťg Ļ”√FSMCŅāĺÄÕ®–Ň£¨“‘ÕÍ≥…ƶ‘ď“ļĺß∆ŃĶń≥ű ľĽĮļÕÔ@ ĺŅō÷∆°£ 2.7 ĪĪ∂∑ń£ČK≤Ņ∑÷’f√ų ĪĪ∂∑ń£ČK≤Ņ∑÷ Ļ”√ĪĪĺ©ļÕ–ĺ–«Õ®ĻęňĺĶńUM220ĪĪ∂∑∂®őĽ–ĺ∆¨£¨∆šŅ…Õ¨ēr÷ß≥÷BD2 B1°ĘGPS L1É…āÄÓlŁc£¨›Ē≥ŲĒĶďĢ∑Ĺ ĹěťUSART£¨ĒĶďĢÖf◊hěťNMEA 0183£¨ń¨’JÕ®–Ň≤®Őō¬ ěť9 600 bit·s-1£¨≤ĘŅ…łýďĢ”√ĎŰ–Ť“™◊‘––‘O∂®◊ÓłŖ÷ß≥÷≤®Őō¬ ěť230 400 bit·s-1£¨∆š›Ē»Ž/›Ē≥Ų–ŇŐĖÓź–ÕĺýěťLVTTLŽä∆Ĺ°£
UM220Õ®Ŗ^īģŅŕŇcDSPŖBĹ”£¨DSPÕ®Ŗ^īģŅŕÕÍ≥…ƶĪĪ∂∑ń£ČKĶńŇš÷√£¨≤ĘĹ” ’∆š∂®őĽ–ŇŌĘ°£
|