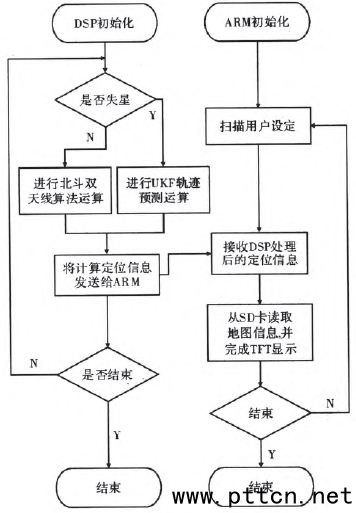
主頁(http://www.by236.com):一種基于雙天線的北斗定位系統設計與實現(3) 3 系統工作流程 3.1 系統總體工作流程 系統采用DSP+ARM雙核結構,DSP與ARM各司其職。在系統上電后,DSP、ARM芯片完成上電復位,DSP通過USART接收北斗定位模塊的定位信息,在不失星的情況下進行北斗雙天線定位算法計算。而DSP在進行北斗雙天線定位算法計算后,通過串口將計算后的北斗定位信息發送給ARM芯片。若處于失星的情況下,進行UKF算法軌跡預測,并將得到的預測結果通過串口發送給ARM芯片,ARM芯片接收到北斗定位信息后,通過FSMC總線將定位信息更新到TFT液晶屏上,如圖5所示。
3.2 軌跡預測算法設計 系統采用無跡卡爾曼濾波(UKF)做為失星情況下的軌跡預測算法。無跡卡爾曼濾波(UKF)是一種基于最小方差估計準則的非線性狀態估計器,其以非線性最優高斯濾波器作為基本理論框架。UKF采用UT變換技術,即采用確定的樣本點(Sigma點)來完成狀態變量統計特性沿時間的傳播,改進了擴展卡爾曼濾波(EKF)不能求解雅可比矩陣以及泰勒級數線性化只具有一階的低精度問題,其逼近精度可達二階或二階以上。U KF算法實現過程如下 Step1
式中,x為未失星前時刻北斗雙天線定位所得定位經、緯度信息;px是x的協方差;n表示系統狀態維數;北斗應用中n取值為2;λ是微調參數,其可控制樣本點到均值的距離。 step2 根據系統狀態方程求樣本點傳遞值 (2) Step3 求系統定位誤差均值和方差的一步預測
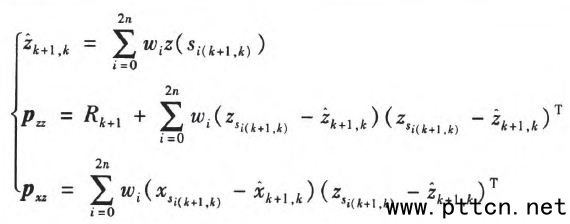
Step4 根據系統量測方程求取定位誤差狀態一步預測的傳遞值
Step5 獲得定位誤差均值和協方差
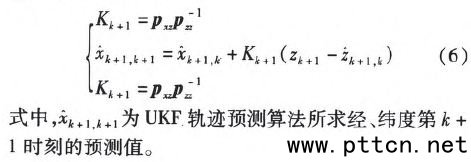
式中,pzz是定位誤差的量測方差矩陣;pxz是定位誤差狀態向量與定位誤差量測向量的協方差矩陣。 Step6 計算UKF增益,更新定位誤差狀態向量和方差
|
 (1)
(1) (3)
(3) (4)
(4) (5)
(5)